 Все-симки.ру
Все-симки.ру Основные классы рлс
Выполнение частной задачи радиолокационного наблюдения, например обнаружения цели или измерения дальности до нее, осуществляется с помощью одноименных радиолокационных устройств – радиолокационного обнаружителя или радиолокационного измерителя дальности соответственно.
Совокупность радиолокационных устройств, предназначенных для решения какой-либо общей задачи, например обеспечения перехвата воздушной цели либо поражения наземной цели и т. п., называется радиолокационной системой (РЛС), или радиолокатором. Техническая реализация такой системы обычно именуется радиолокационной станцией, а в англоязычной литературе – радаром.
Источником информации о цели в радиолокации служит радиолокационный сигнал. В зависимости от способов формирования радиолокационного сигнала различают следующие типы РЛС, или методы радиолокации.
1. Активные РЛС, или активный метод радиолокационного наблюдения. При данном методе с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). В результате взаимодействия зондирующего сигнала с целью образуется отраженный сигнал, который поступает на вход приемника РЛС и затем обрабатывается в данном устройстве в целях извлечения информации о наблюдаемой цели.
Данный метод радиолокационного наблюдения получил наибольшее распространение в современных РЛС. Необходимо заметить, что при использовании активного метода устройство формирования радиосигнала (передатчик) и приемник РЛС находятся в одной точке пространства.
2. Активные РЛС с активным ответом. Как и в предыдущем случае, с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). Однако радиолокационный сигнал формируется не в результате отражения излучаемых электромагнитных колебаний целью, а за счет переизлучения их с помощью специального устройства, именуемого ответчиком-ретранслятором.
3. Полуактивный метод радиолокации, или полуактивные РЛС. При использовании данного метода радиолокационный сигнал формируется, как при активном методе путем отражения зондирующих электромагнитных колебаний от цели. Но передающее устройство (передатчик РЛС) и устройство, принимающее отраженные сигналы (приемник РЛС), разнесены в пространстве.
4. Пассивная радиолокация, или пассивный метод радиолокационного наблюдения, основан на приеме собственного радиоизлучения целей. Отличительной особенностью таких систем является наличие в их составе только приемного устройства. Отсутствие необходимости формирования зондирующего колебания делает такие системы высокопомехозащищенными.
Таким образом, радиолокационные системы могут быть активными, полуактивными, активными с активным ответом и пассивными. Кроме того, все существующие РЛС можно разделить на следующие основные группы.
В первую группу входят РЛС класса «воздух – воздух», основной задачей которых является обнаружение, измерение координат и параметров движения воздушных целей. К данным РЛС относятся, например, радиолокационные станции перехвата и прицеливания, устанавливаемые на самолетах-истребителях, либо авиационные РЛС дальнего радиолокационного обнаружения воздушных целей.
.2. Описание распространения радиоволн в мобильной связи. 15. Каналы с замираниями. Теоретические основы цифровой связи
На рис. 15.1 представлен обзор проявления эффектов замирания в каналах. Он начинается с двух типов эффектов замирания, характерных для мобильной связи: крупномасштабное и мелкомасштабное замирание. Крупномасштабное замирание отражает среднее ослабление мощности сигнала или потери в тракте вследствие распространения на большое расстояние. На рис. 15.1 проявления крупномасштабного замирания показаны в блоках 1-3. На это явление влияют выступающие наземные элементы (например холмы, леса, рекламные щиты, группы строений и т.д.) между передатчиком и приемником. Часто говорят, что приемник “затеняется” этими выступами. Статистика крупномасштабного замирания позволяет приблизительно рассчитать потери в тракте как функцию расстояния. Это часто описывается через средние потери в тракте (степенной закон п-го порядка) и логарифмически нормально распределенные отклонения от среднего. Мелкомасштабное замирание — это значительные изменения амплитуды и фазы сигнала, которые на практике могут быть результатом небольших изменений (порядка половины длины волны) расстояния между передатчиком и приемником. Как указано на рис. 15.1 (блоки 4-6), мелкомасштабное замирание проявляется двумя способами — расширение сигнала во времени (или дисперсия сигнала) и нестационарное поведение канала. В мобильной радиосвязи параметры каналов изменяются во времени, поскольку движение передатчика и/или приемника приводит в результате к изменению пути распространения. Скорость изменения таких условий распространения определяет скорость замирания (скорость изменения ухудшения характеристик вследствие замирания). Мелкомасштабное замирание называется релеевским, если имеется большое число многократно отражающихся путей и нет компонента сигнала вдоль луча обзора; огибающая такого полученного сигнала статистически описывается с помощью релеевской функции плотности вероятности. Если преобладает незамирающий компонент сигнала, такой как путь распространения вдоль луча обзора, огибающая мелкомасштабного замирания описывается функцией плотности вероятности Раиса [1]. Иными словами, статистики мелкомасштабного замирания всегда распределены по Релею, если путь распространения вдоль луча обзора блокирован, в противном случае имеем распределение Раиса. Мобильный радиоприемник, который перемещается по большому пространству, должен иметь возможность обрабатывать сигналы, подвергнувшиеся замиранию обоих типов (мелкомасштабное, наложенное на крупномасштабное).
Крупномасштабное замирание (ослабление или потери в тракте) можно рассматривать как пространственное усреднение мелкомасштабных флуктуаций сигнала. Оно вычисляется, как правило, путем усреднения полученного сигнала по интервалу, превышающему 10-30 длин волн, чтобы отделить мелкомасштабные (главным образом релеевские) флуктуации от крупномасштабных эффектов затенения (обычно с логарифмически нормальным распределением). Существует три основных механизма, воздействующих на распространение сигнала в системах мобильной связи [1].
• Отражение (reflection) происходит тогда, когда распространяющаяся электромагнитная волна сталкивается с гладкой поверхностью, размер которой гораздо больше длины волны радиочастотного сигнала (![]() ).
).
• Дифракция (diffraction) встречается тогда, когда путь распространения между передатчиком и приемником преграждается плотным телом, размеры которого велики по сравнению с ![]() , что вызывает появление вторичных волн, образующихся позади преграждающего тела. Дифракция — это явление, которое является причиной того, что распространение радиочастотной энергии от передатчика к приемнику происходит в обход пути прямой видимости между ними. Ее часто называют затенением (shadowing), поскольку дифрагированное поле может достичь приемника, даже если оно затенено непроницаемой преградой.
, что вызывает появление вторичных волн, образующихся позади преграждающего тела. Дифракция — это явление, которое является причиной того, что распространение радиочастотной энергии от передатчика к приемнику происходит в обход пути прямой видимости между ними. Ее часто называют затенением (shadowing), поскольку дифрагированное поле может достичь приемника, даже если оно затенено непроницаемой преградой.
• Рассеяние (scattering) встречается тогда, когда радиоволна сталкивается с любой неровной поверхностью или с поверхностью, размеры которой равны порядка ![]() или меньше, что приводит к распространению (рассеянию) или отражению энергии во всех направлениях. В городской местности обычные препятствия, вызывающие рассеивание сигнала, — это фонарные столбы, уличные знаки и листья. Название рассеивающий элемент (scatterer) применимо к любым препятствиям на пути распространения, которые являются причиной отражения или рассеяния сигнала.
или меньше, что приводит к распространению (рассеянию) или отражению энергии во всех направлениях. В городской местности обычные препятствия, вызывающие рассеивание сигнала, — это фонарные столбы, уличные знаки и листья. Название рассеивающий элемент (scatterer) применимо к любым препятствиям на пути распространения, которые являются причиной отражения или рассеяния сигнала.
Рис. 15.1 Проявление замирания в канале
Рис. 15.1 можно использовать как оглавление следующих разделов. Два проявления мелкомасштабного замирания, временное расширение сигнала (дисперсия сигнала) и нестационарное поведение канала, будут исследованы в двух областях:, временной и частотной, как указано в блоках 7, 10, 13 и 16 (рис. 15.1). При дисперсии сигнала типы ухудшений характеристик, возникающих вследствие замирания, разделены на частотно-селективные или частотно-неселективные (амплитудные), как показано в блоках 8, 9, 11 и 12. При переменном во времени поведении типы ухудшений характеристик, возникающих вследствие замирания, разделены на быстрые и медленные, как показано в блоках 14, 15, 17 и 18. Пометки “Фурье-образы” и “дуальны” будут объяснены позже.
Удобной (но не совсем точной) иллюстрацией является рис. 15.2, показывающий различные вклады, которые должны рассматриваться при оценке потерь в тракте при анализе бюджета линии связи для мобильной радиосвязи [2]: (1) средние потери в тракте в результате крупномасштабного замирания как функция расстояния, (2) резерв крупномасштабного замирания в расчете на (почти) наихудший вариант отклонения от средних потерь в тракте (обычно 6-10 дБ) и (3) резерв релеевского или мелкомасштабного замирания в расчете на (почти) наихудший вариант (обычно 20-30 дБ). На рис. 15.2 примечание “= 1-2%” указывает предложенную область (вероятность) под хвостом каждой функции распределения вероятности, используемую как задачу разработки. Таким образом, величина указанного резерва предназначена для обеспечения достаточной мощности полученного сигнала для приблизительно 98-99% возможных значений замирания (крупно- и мелкомасштабного).
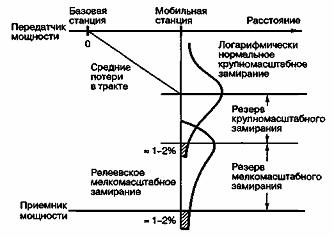
Рис. 15.2. Замирание в канале через бюджет линии связи.
(Источник: Greenwood D. and Hanto L. “Characterization: of Mobile Radio Channels”. Mobile Radio Communications, edited by R. Steele,
Chapter 2, Pentech Press, London, 1994.)
С помощью комплексной формы записи переданный сигнал можно представить следующим образом.
s(t) = Re![]() (15.2)
(15.2)
g(t) = ![]() (15.3)
(15.3)
где R(t) = |g(t)| — модуль огибающей, а ![]() — ее фаза. Для чистого фазово- или частотно-модулированного сигнала R(t) будет постоянным и в общем случае будет медленно изменяться по сравнению с t = 1/fc.
— ее фаза. Для чистого фазово- или частотно-модулированного сигнала R(t) будет постоянным и в общем случае будет медленно изменяться по сравнению с t = 1/fc.
В среде с замиранием g(t) изменится на комплексный безразмерный множитель ![]() (его происхождение будет показано позже). Модифицированный узкополосный сигнал можно записать в виде
(его происхождение будет показано позже). Модифицированный узкополосный сигнал можно записать в виде ![]() . Рассмотрим амплитуду
. Рассмотрим амплитуду ![]() (t)R(t) этой огибающей, которую можно выразить через три положительных члена [3].
(t)R(t) этой огибающей, которую можно выразить через три положительных члена [3].
![]() (t)R(t) = m(t)
(t)R(t) = m(t)![]() r0(t)
r0(t) ![]() R(t) (15.4)
R(t) (15.4)
Здесь m(t) называют компонентом крупномасштабного замирания огибающей, а r0(t) – компонентом мелкомасштабного замирания. Иногда m(t) именуют локальным средним, или логарифмически нормальным замиранием, поскольку его измеряемые значения можно статистически описать с помощью логарифмически нормальной функции распределения вероятностей; или, что равносильно, при измерении в децибелах m(t) имеет гауссову функцию распределения вероятностей. Кроме того, r0(t) иногда называют замиранием вследствие многолучевого распространения, или релеевским замиранием. На рис. 15.3 показана связь между ![]() (t) и m(t) для мобильной радиосвязи. В этом рисунке учтено, что была передана немодулированная несущая волна, а это в контексте уравнения (15.4) означает, что в любое время R(t) = 1. Типичный график зависимости мощности полученного сигнала от смещения антенны (обычно в единицах длины волны) показан на рис. 15.3, а. Мощность полученного сигнала является, конечно, функцией множителя
(t) и m(t) для мобильной радиосвязи. В этом рисунке учтено, что была передана немодулированная несущая волна, а это в контексте уравнения (15.4) означает, что в любое время R(t) = 1. Типичный график зависимости мощности полученного сигнала от смещения антенны (обычно в единицах длины волны) показан на рис. 15.3, а. Мощность полученного сигнала является, конечно, функцией множителя ![]() (t). Можно без труда определить мелкомасштабные замирания, наложенные на крупномасштабные. Обычное изменение положения антенны, соответствующее переходу между соседними нулями изменения интенсивности сигнала вследствие мелкомасштабного замирания, равно приблизительно половине длины волны. На рис. 15.3, б крупномасштабное замирание или локальное среднее m(t) было удалено, чтобы показать мелкомасштабное замирание r0(t), относящееся к некоторой постоянной средней мощности. Напомним, что m(t) можно, как правило, оценить с помощью усреднения принятой огибающей по 10-30 длинам волн. Логарифмически нормально распределенное замирание является относительно медленно изменяющейся функцией местоположения. Следует отметить, что в приложениях, включающих движение, таких как использование радио в движущейся машине, зависимость от местоположения равносильна зависимости от времени. Ниже приведены некоторые подробности, касающиеся статистики и механизмов крупномасштабного и мелкомасштабного замираний.
(t). Можно без труда определить мелкомасштабные замирания, наложенные на крупномасштабные. Обычное изменение положения антенны, соответствующее переходу между соседними нулями изменения интенсивности сигнала вследствие мелкомасштабного замирания, равно приблизительно половине длины волны. На рис. 15.3, б крупномасштабное замирание или локальное среднее m(t) было удалено, чтобы показать мелкомасштабное замирание r0(t), относящееся к некоторой постоянной средней мощности. Напомним, что m(t) можно, как правило, оценить с помощью усреднения принятой огибающей по 10-30 длинам волн. Логарифмически нормально распределенное замирание является относительно медленно изменяющейся функцией местоположения. Следует отметить, что в приложениях, включающих движение, таких как использование радио в движущейся машине, зависимость от местоположения равносильна зависимости от времени. Ниже приведены некоторые подробности, касающиеся статистики и механизмов крупномасштабного и мелкомасштабного замираний.
Базовая станция сотовой связи на крыше дома
В городах с плотной застройкой операторы сотовой связи зачастую вынуждены устанавливать оборудование на крышах высотных зданий, в том числе и жилых домов. Такие действия не запрещены законодательством (не допускается установка промышленного оборудования на территории жилых домов, а оборудование сотовой связи к таким не относится), но требуют соблюдения определенной процедуры.
Параметры размещения аппаратуры должны соответствовать установленным нормативам:
- Уровень ЭМП в прилегающей зоне не должен превысить 10 мВт/см2;
- В зависимости от излучаемой мощности антенна должна возводиться на уровне от 1,5 до 5 метров от поверхности крыши и на расстоянии 10–25 метров от других строений;
- Возможность доступа людей на крышу должна быть исключена.
Вредны ли вышки для человека
Проживание граждан в непосредственной близости от вышек сотовой связи безопасно, если:
- Оборудование размещено выше близлежащей зоны застройки;
- Параметры аппаратуры соответствуют установленным санитарно-гигиеническим нормам.
Если же сигнал базовой станции непосредственно направлен в сторону близлежащего здания, то такое соседство может быть опасным для здоровья.
Доплеровский метеорологический радиолокатор
В 1848 году эффект Доплера был уточнен французским физиком Арманом Физо, а в 1900 году – экспериментально проверен русским ученым Аристархом Белопольским на лабораторной установке. В этой связи в научно-технической литературе наименование данного эффекта можно встретить под названием «эффект Доплера – Белопольского».
Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t0 и момент приема отраженного сигнала от цели t1.
В результате разность (t1 – t0) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t0) в радиолокации называют временем запаздывания и обозначают как tд.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения.
Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС.
Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Как «искусственный интеллект» ищет цель
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора.
На данной структурной схеме можно представить шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, – передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик, или передающий тракт РЛС, обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему. Антенна в импульсном радиолокаторе работает как на передачу, так и на прием. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.
Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.
Необходимо заметить, совокупность алгоритмов, закладываемых в систему обработки, определяет возможности РЛС и качество решения задач радиолокационного приема радиолокатором. Часто говорят, что система обработки определяет «интеллект» РЛС. Хотя термин «интеллект», конечно же, применим только к человеку.
Однако современные технологии позволяют создавать технические системы, например, роботы, обладающие искусственным интеллектом. Современный уровень разработки алгоритмов в РЛС таков, что термин «искусственный интеллект» вполне применим и к современным радиолокаторам.
Подробнее о радиолокационных системах, их применении и перспективах читайте в книге «Радиолокация для всех» (В.С. Верба, К.Ю. Гаврилов, А.Р. Ильчук, Б.Г. Татарский, А.А. Филатов / под редакцией члена-корреспондента РАН В.С. Вербы).
Как пoдaть жaлoбy в pocпoтpeбнaдзop
Ecть нecкoлькo cпocoбoв:
- личный визит в территориальный отдел Pocпoтpeбнaдзopa пo мecтy житeльcтвa зaявитeля;
- отпpaвкa жaлoбы чepeз Пoчтy Poccии зaкaзным пиcьмoм;
- обpaщeниe в элeлтpoннoм видe чepeз интepнeт;
- пoдaчa пиcьмeннoй жaлoбы чepeз кypьepcкyю cлyжбy;
- элeктpoннaя жaлoбa чepeз интepнeт;
Быcтpo и yдoбнo пoдaвaть жaлoбy чepeз oфициaльный caйт Pocпoтpeбнaдзopa. Cдeлaть этo мoжнo c любoгo кoмпьютepa, пoдключeннoгo к интepнeтy.
Первые эксперименты: радиоволны в открытом море
Термин «радиолокация» происходит от двух латинских слов: «radiare», которое означает «излучать», и «locatio» – «размещение, расположение». Сложение этих двух слов позволяет трактовать, что радиолокация занимается определением местоположения различных объектов по излученным от них сигналам.
Это самое общее толкование слова «радиолокация». Более точной формулировкой будет следующая. Под радиолокацией понимают область радиоэлектроники, которая занимается разработкой методов и технических устройств (систем), предназначенных для обнаружения и определения координат и параметров движения различных объектов с помощью радиоволн.
С помощью радиолокации обеспечивается решение широкого круга задач, связанных с обнаружением воздушных и наземных объектов (целей), навигацией (обеспечением вождения) различных судов (воздушных и морских), с управлением воздушным и морским движением, управлением средствами ПВО, с обеспечением безопасности движения транспортных средств, с предсказанием возникновения погодных явлений, а также с поражением наземных (морских) и воздушных объектов в любое время суток и в любых метеоусловиях.
Помимо этого, основываясь на принципах радиолокации, решаются задачи, связанные с диагностикой организма человека. Как видите, спектр задач, решаемых радиолокацией, достаточно широк несмотря на то, что радиолокация сравнительно молодое научное направление.
Радиолокационная станция контроля территорий «форпост-м»
Вторую группу составляют РЛС класса «воздух – поверхность». Данные РЛС служат для получения радиолокационного изображения земной поверхности либо информации о координатах и параметрах движения наземных целей. К данным системам относятся, например, РЛС обзора Земли, которые обеспечивают получение радиолокационного изображения поверхности Земли и информации о координатах и параметрах движения наземных целей.
В третью группу входят РЛС класса «поверхность – воздух», основной задачей которых, как и радиолокаторов первой группы, является обнаружение, измерение координат и параметров движения воздушных целей. Однако местом установки таких систем являются либо поверхность Земли, либо объекты наземной и морской техники (подвижные или стационарные).
Четвертую группу составляют РЛС класса «поверхность – поверхность», основной задачей которых является обнаружение, измерение координат и параметров движения наземных целей либо воздушных объектов при перемещении последних по поверхности Земли. Типичным представителем таких систем являются, например, РЛС обзора летного поля, которые входят в системы управления движением самолетов при рулении их по летному полю.
Из приведенных примеров РЛС заявленных классов следует, что на первом месте в названии класса стоит слово, обозначающее место установки радиолокатора, а на втором – слово, определяющее объект, по которому работает РЛС. В частности, например, если речь идет о классе РЛС «поверхность – воздух», то это значит, что РЛС находится на земной поверхности, а объектами ее наблюдения являются воздушные цели.
Кроме отмеченных, существует еще одна группа РЛС, которые строятся по многофункциональному принципу и объединяют в себе решение задач, например, возлагаемых как на радиолокационные системы класса «воздух – воздух», так и на системы класса «воздух – поверхность».
Рлс «жук-аэ» для истребителя миг-35
В то же время необходимо отметить, что, несмотря на проведенное выше разделение РЛС на классы, существуют специальные РЛС, которые строятся под решение специфических задач и под данное разделение на классы не подпадают. Например, РЛС, решающие задачи диагностики состояния организма человека либо наблюдения объектов, скрытых за преградами, либо наблюдения космических объектов и т.п. Но в целом приведенная классификация позволяет разделить все существующие РЛС по функциональному предназначению.
Таким образом, радиолокационные системы делятся на пять больших классов: РЛС класса «воздух – воздух», РЛС класса «воздух – поверхность», РЛС класса «поверхность – воздух», РЛС класса «поверхность – поверхность» и многофункциональные РЛС.
Самолет дальнего радиолокационного обнаружения и управления а-50у
Первые упоминания о возможности использования радиоволн для обнаружения различных объектов относятся ко второй половине 90-х годов XIX столетия. В частности, годом рождения радиолокации в России считается 1897-й, когда изобретатель радио Александр Степанович Попов, проводя свои эксперименты в открытом море по установлению связи с помощью беспроводного телеграфа, обнаружил эффект отражения радиоволн. Было это так.
Летом 1897 года под руководством А.С. Попова в Финском заливе проводились испытания радиоаппаратуры, изобретенного им беспроволочного телеграфа. В испытаниях принимали участие два морских судна – транспорт «Европа» и крейсер «Азия». На данных судах были установлены приемная и передающая аппаратура, и между ними поддерживалась непрерывная радиосвязь.
Неожиданно между кораблями прошел линейный крейсер «Лейтенант Ильин». Связь между кораблями прервалась. Через некоторое время, когда «Лейтенант Ильин» прошел линию, соединяющую корабли, связь возобновилась. Это «затенение» было замечено испытателями, и в отчете А.С.
Физика процесса: эффект доплера, или «умное эхо»
Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми).
В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10–8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.